Автопилот, устройство или программно-аппаратный комплекс, ведущий транспортное средство по определённой траектории. Наиболее часто автопилоты применяются для управления летательными аппаратами, в связи с тем, что полёт происходит обычно в пространстве, не содержащем большого количества препятствий, а также для управления транспортными средствами, движущимися по рельсовым путям.
Впервые полёт самолёта, автоматически управляемый автопилотом фирмы «Сперри» (США), был продемонстрирован на Всемирной выставке в Париже в 1914. Первоначально автопилот предназначался только для стабилизации угловых движений самолёта (движения относительно центра масс), что давало возможность выдерживать заданный режим полёта самолёта без участия лётчика. Усовершенствование автопилота позволило создать автоматизированную систему, которая производит управление летательным аппаратом не только относительно его центра масс, но также и его центром масс. Это дало возможность автоматизировать все режимы полёта летательного аппарата от взлёта до посадки. Такие автопилоты автоматически управляют как рулевой системой летательного аппарата, так и его силовыми установками. Создание автопилота сделало возможным полёты беспилотных летательных аппаратов (ракеты, авиа-БПЛА, искусственные спутники Земли и т. д.), позволив тем самым при опасных полетах отказаться от необходимости подвергать риску жизни человеческого экипажа.
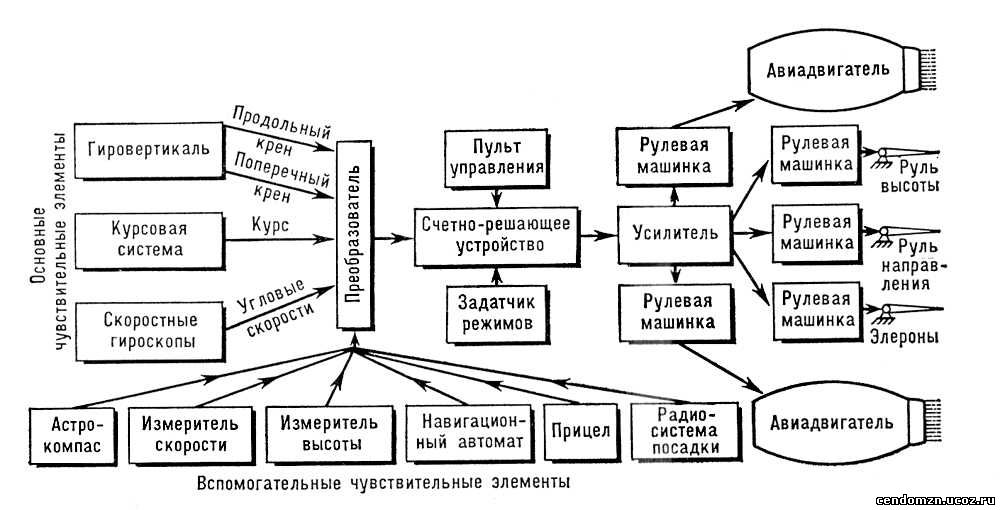
Автопилот (АП) на самолёте состоит из ряда подобных по принципу действия автоматов (курса, продольно-поперечных кренов, скорости, высоты и др.), совместная работа которых управляет полётом и стабилизует его. Чувствительные элементы каждого автомата измеряет один, определённый для него параметр режима полёта (высоту, или курс, или тягу двигателей) — он называется параметром регулирования. И автоматический блок вырабатывает сигнал, пропорциональный текущему значению параметра. Задатчик режимов полёта вырабатывает сигналы, каждый из которых соответствует требуемому значению определенного параметра регулирования. Эти сигналы сравниваются в вычислительном устройстве. Их разность (рассогласование) после усиления поступает на рулевую машинку автопилота, отклоняющую соответствующий руль самолёта или орган управления двигателем при помощи сервомоторов . Так происходит изменение режима полёта. Когда этот режим достигает заданного, сигнал рассогласования исчезает, рулевая машинка прекращает движение и наступает положение равновесия. Устойчивость систем автоматического управления летательными аппаратами достигается как регулированием по производным от регулируемых параметров, так и отрицательными обратными связями соответствующих видов. Кроме автоматики, в автопилот входят системы управления и регулировки.
Хотя современный автопилот позволяет автоматизировать все этапы полета, тем не менее, взлет и посадка, в связи с большим количеством технических сложностей данных этапов, фактически производятся вручную экипажем самолёта.
Более глубокое развитие автоматизации полёта в авиации получили системы автоматического управления (САУ, БСУ или АБСУ), и как более сложные структуризированные комплексы - НПК, ПНК, ПрНК и т.п. САУ позволяет, помимо стабилизации самолёта в пространстве и на маршруте, также реализовать программное управление на различных этапах полёта. Наиболее сложные САУ берут на себя значительную часть функций по управлению самолётом в "штурвальном режиме", делая управление для лётчика лёгким и единообразным, парируя болтанку,предотвращая сносы, скольжения, выходы на критические режимы полёта и даже запрещая или игнорируя некоторые действия лётчика. В автоматических режимах САУ ведёт самолёт по заданному маршруту (или реализует более сложную подпрограмму боевого применения), используя пилотажно-навигационную информацию от группы собственных датчиков, самолётных систем, наземных радионавигационных средств или даже выполняя команды бортового оборудования соседнего самолёта (некоторые боевые ЛА могут работать в паре или группой, постоянно обмениваясь тактической информацией по радиоканалам, вырабатывая тактику совместных действий и выполняют полётное задание в автоматическом (чаще полуавтоматическом) режиме. Подсистема траекторного управления позволяет выполнять заход на посадку с высокой точностью без вмешательства экипажа. В качестве управляющих органов уже давно стараются не применять рулевые машины, включёные в проводку управления, а используют прямое управление рулевыми агрегатами, подмешивая управляющие сигналы от САУ в сигналы от штурвала (или РУС). Для создания лётчику привычных усилий на органах управления применяется довольно сложная электромеханическая система имитации загрузки. В последнее время от этой практики постепенно отходят, резонно считая, что как не имитируй, всё равно большая часть процесса управления ВС автоматизирована. Всё чаще в кабинах современных самолётов применяются боковые ручки управления типа "сайдстик" .
Основной проблемой при построении автопилотов (АП) и автоматических систем управления является безопасность полёта. В простейших авиационных автопилотах предусматривается быстрое отключение автопилота лётчиком при нарушениях его нормальной работы, возможность "пересиливания" рулевых машин ручным управлением, механическое отлючение рулевых машин от проводки управления. Системы автоматического управления изначально проектируются с расчётом на отказы с сохранением основых функций работы и предусматривается комплекс мер для повышения безопасности полёта. САУ проектируются многоканальными, то есть параллельно работают два, три и даже четыре абсолютно одинаковых канала управления на общий рулевой привод (РП) и отказ одного-двух каналов никак не влияет на общую работоспособность системы. Система контроля (СК) постоянно отслеживает соответствие входных сигналов, прохождение сигналов по цепям и выполняет непрерывный контроль выходных параметров САУ в течение всего полёта, как правило, по методу кворумирования (голосование большинством) или сравнения с эталоном, и в случае возникновения какого либо отказа система самостоятельно принимает решение на возможность дальнейшей работы режима, его переключения на резервый канал, дублирующий режим или передачи управления лётчику. Хорошим методом общего контроля исправности САУ считается предполётный тест-контроль, методом "прогона" пошаговой программы, подающей стимулирующие имитационные сигналы в различные входные цепи системы, что вызывает фактические отклонения рулевых и управляющих поверхностей самолёта в различных режимах работы.
Понятие "автопилоты" (иногда в жаргонной форме) включают в себя, помимо классического авиационного автопилота, также и системы автоматического пилотирования, вождения или управления всевозможными шагающими, колесными, плавающими или крылатыми машинами (роботами), и развивающиеся системы автоматического управления автомобилей в условиях шоссе. Примером канала автоматического управления автомобилем может служить система стабилизации текущей скорости движения, известная как "круиз-контроль" ("автоспид", "автодрайв").